Deep Learning-Based Keypoints Driven VIO for GNSS-Denied Flight
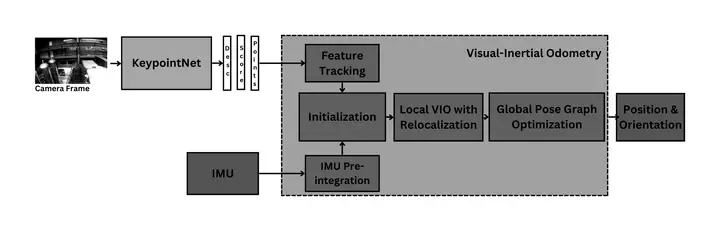
This project aims to investigate the feasibility of replacing the conventional hand-crafted feature extractor module in visual-inertial odometry with a deep learning-based feature extractor. Our research demonstrates the comparable performance of the proposed method to the traditional one. Specifically, we implemented a hybrid system based on the widely used state-of-the-art visual-inertial system, VINS-Mono, by integrating convolutional neural network(CNN)-based features. Our experimental results indicate that the proposed method achieves performance on par with the conventional approach while offering potential advantages in terms of robustness and adaptability.
Arslan Artykov
PhD student
My research interests include diffusion models, 3D reconstruction, and visual/inertial localization.